

▶▶▶ FAULHABER Drive Time
このFAULHABER Drive Timeでは、モーターをドライバーに接続する方法やドライブシステムを操作する概要など専門家の アンドレアス・ワゲナー(Dr. Andreas Wagener )が動画内で詳しく説明します。
※使用方法をより分かりやすくする為,今後も動画配信を行ってまいります。
ー 今回の動画に登場するモータ ー


FAULHABERは最新のGPTギアテクノロジーを駆使した新しいリニアアクチュエータ『22L/32Lシリーズ』によって、幅広いアプリケーションにユニークなソリューションを提供します。
産業用生産ラインの自動化や光学機器アプリケーション、ロボット分野向けに設計されています。
リニアアクチュエータ"L"シリーズは、さまざまなDCモータや2極/4極のブラシレスモータ、フラットブラシレスモータ、ステッピングモータにも組合せることができ、FAULHABERモータのラインナップをトルクと速度において最大限に活用できるよう最適化されています。
ボールネジとリードネジの基本的な違いは、ボールネジナットの回転運動にあります。これによりリードネジに特有の摩擦がなくなり、非常に高い効率が得られます。一方、リードネジはカスタマイズ性が良く、特性やメンテナンスにおいて費用対効果に優れています。ご用途に応じてご検討ください。
オプション
■ ネジの種類と長さ
■ ナットの種類と長さ
■ 特別な使用環境
(温度範囲の拡張、真空対応)
■ 取付穴とモータケーブルの角度調整
ご使用分野
■ ロボット工学
■ 産業機械
■ 光学機器
■ 実験装置

薄いシートの結合はレーザーの応用技術により可能です。半田や溶接の接合部は非常に細く正確に、そして耐久性が必要です。特定のポイントに高エネルギーをあてることにより溶接のスピードが非常に高まりますが、この性能技術にはレーザーの高精度の位置制御が必要となります。機械的検知による新方式は最適な位置決めと迅速なセットアップを可能にします。
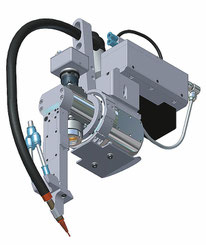
従来レーザー溶接において、カメラは接合部の軌跡を記録するために使われていました。コンピューターは画像を分析し溶接ロボットに制御命令を出しますが、その時にレーザーヘッドの位置決めをします。このソリューションの欠点はヘッドが遅延して間接的に動くことでカメラに対して常に遅れを取ってしまうことです。信頼性のある光学的“接合確認”は、表面、反射、照明が可能な限り均一になっていなければなりません。偏差はエラーの原因となりますので、エラーの発生源は調整を入念に行うことによって取り除く必要があります。このプロセスを向上させるため、scansonic社は全く新しいアプローチを選択しました。:機械的検知です。

機械的検知
開発者は機械的レーザーヘッドのガイダンスにて新たな方法をとりましたが、それは結合に関して必須の前提条件を採用したことです。接合部の段差は常に二つのシートの結合結果からなり、また同じことがアングルを溶接することにも発生します。これはシートのオーバーラップ、または接合部の隙間のいずれかによるものです。今日の溶接では溶接点にガイドワイアを使い、補助材料が導入されています。 従って「タッチワイヤ」は常に有ることになります。 これらのコンポーネントをまとめて処理すると最適な、つまりピンポイントに正確な溶接ヘッドのコントロールができます。 補助ワイアが常にオーバーラップするシートのエッジに対して若干押されていると、この力がヘッドコントロールのためのパラメータとして使用でき、これにより溶接点が正確に接合軌道を追うようになります。 この動きはヘッドの動作と同時に行われ、ヘッドの遅延制御が不要になります。 公差による偏差はこのような手順により直ちに補正されます。この結果接合は常に必要とされるポイント、すなわち結合部品間のオーバーラップのエッジ部に正確に行われます。この検知は純粋に機械的に行われるので、光学的反射や照明(もしくは異なるシートの表面)が全体的なパフォーマンスに影響を及ぼすことはありません。 他のワークプロセスによるシャドー形成やスパークは発生しません。 補助ワイアが「消耗センサ」として常時交換されるので磨耗も発生しません。

自宅や外出先、また会社のオフィスなどFAULHABER社の提供するウェビナーは、
製品とソリューションについていつでもどこからでも学べます。
・ドライブの専門家がツールとアプリケーションのノウハウを紹介し、各セッションの最後には質疑応答の場も有ります。
・必要なドライブの計算をサポートするドライブ選択ツールの詳細な説明や、モーションマネージャーソフトウェアについて学べます。
・以上のツールやその他のツールでFAULHABER社製品を最適に使用する方法を紹介いたします。
・ウェビナーの一部では、モーターノイズの発生、DCモーターの計算、その他固有のアプリケーションについてなど技術的な質問も受け付けます。

ウェビナー閲覧につきまして
FAULHABERウェビナーを閲覧する際は簡単な登録が必要になります。また参加は無料ですが、参加人数には限りがあります。
その他、開催日程につきましては本国サイトで随時更新されます。
こちらよりご確認下さい。


WEBINARS▶▶▶ウェビナーアーカイブ
ウェビナーを見逃しても、FAULHABER GoToステージで過去のウェビナーが閲覧できます。
※ウェビナーは英語とドイツ語で提供されます。


Faulhaberが75周年を
迎えました
~私たちのサクセスストーリー~
私たちのサクセスストーリーは1940年代後半に始まりました。1947年、若きエンジニア、フリッツ・ファウルハーバー博士が最初の会社「Feinmechanische Werkstätten」(精密機械工房)を設立。ファウルハーバーは1950年代前半に世界的に有名なVoigtländer社のために “Vitessa “を開発し納入しました。この「Vitessa」は画期的なほどシンプルな操作性を実現したカメラであり2つのボタンを順番に押すだけでカメラの起動とフィルムの送り出しを可能にしました。当時、彼はすでに電動モータを使ってフィルムを進めるというアイデアを試行錯誤していました。しかし、当時の技術では設置スペースに見合った小型のモータを作ることが出来ませんでした。1950年代半ば、彼は再びデスクに向かい 目の前のカメラそのものに留まるだけではなく、電池でフィルムを進めるのに十分な効率とパワーを持つ電気モータとはどのようなものかを考えました。そして、鉄心のない、自立支持型の斜め巻線設計を用いた、革新的な駆動技術を開発。この技術は彼のカメラに対する課題を解決するだけでなく、世界中の多くの応用分野で将来の小型化の基礎となるものだった。
▼▼▼ お問い合わせはこちらから ▼▼▼
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。